 See more from Coding and the Arts
See more from Coding and the Arts
This project, from chapter 4 of Coding and the Arts, can either be a really fun unplugged approach to get students thinking about how algorithms can be expressed physically, or you can plug it in using servos or motors.
Exemplars
The two images below demonstrate a couple of ways you might building the motion portion of an automaton with household materials.
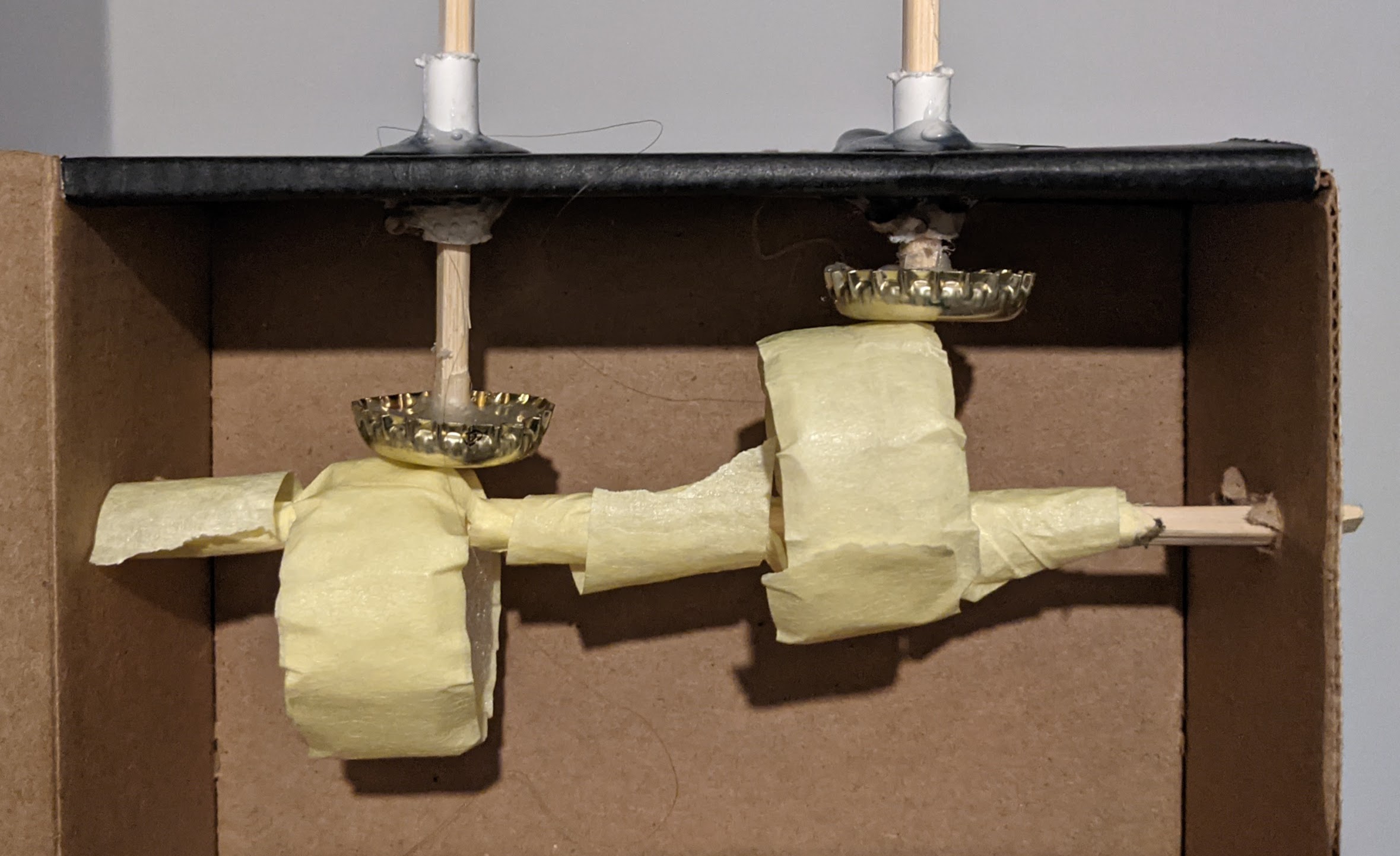
This first example uses a chopstick as the shaft, firm packing foam wrapped in tape as the cams, and bottle caps as the followers. Another pair of chopsticks serve as pistons with straw segments as guides to prevent wobbling.

The second example replaces the shaft, cams, and followers with bend wire hangers. This approach makes it a bit easier to iterate on the shape of movment by continuing to bend the wires, but results in a back and forth motion as the pistons raise and lower (though you could definitely use that to your advantage!).